システムでは,面積,長さ,最大および最小の高さの正確な測定を容易にし,土工のための平均高さを計算します.平均測定に基づいて飛行機の高さを自動的に決定し,土地の平準化を完了します.傾斜飛行機操作は,スタートとエンドの高さを設定するだけで,ベースステーションの必要性をなくします.さまざまなネットワーク差分システムへの接続
特徴 ハイライト
単斜面操作
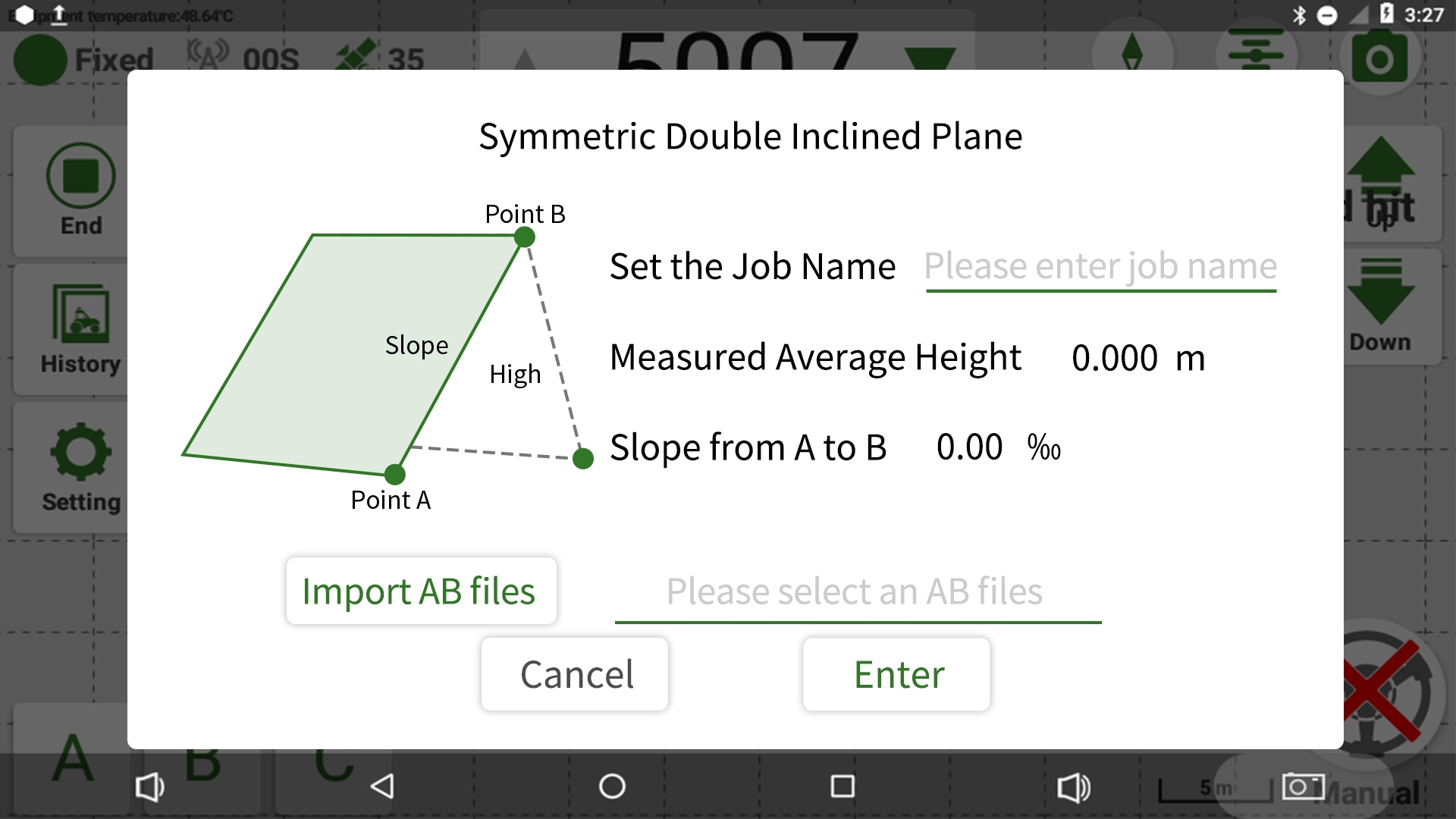
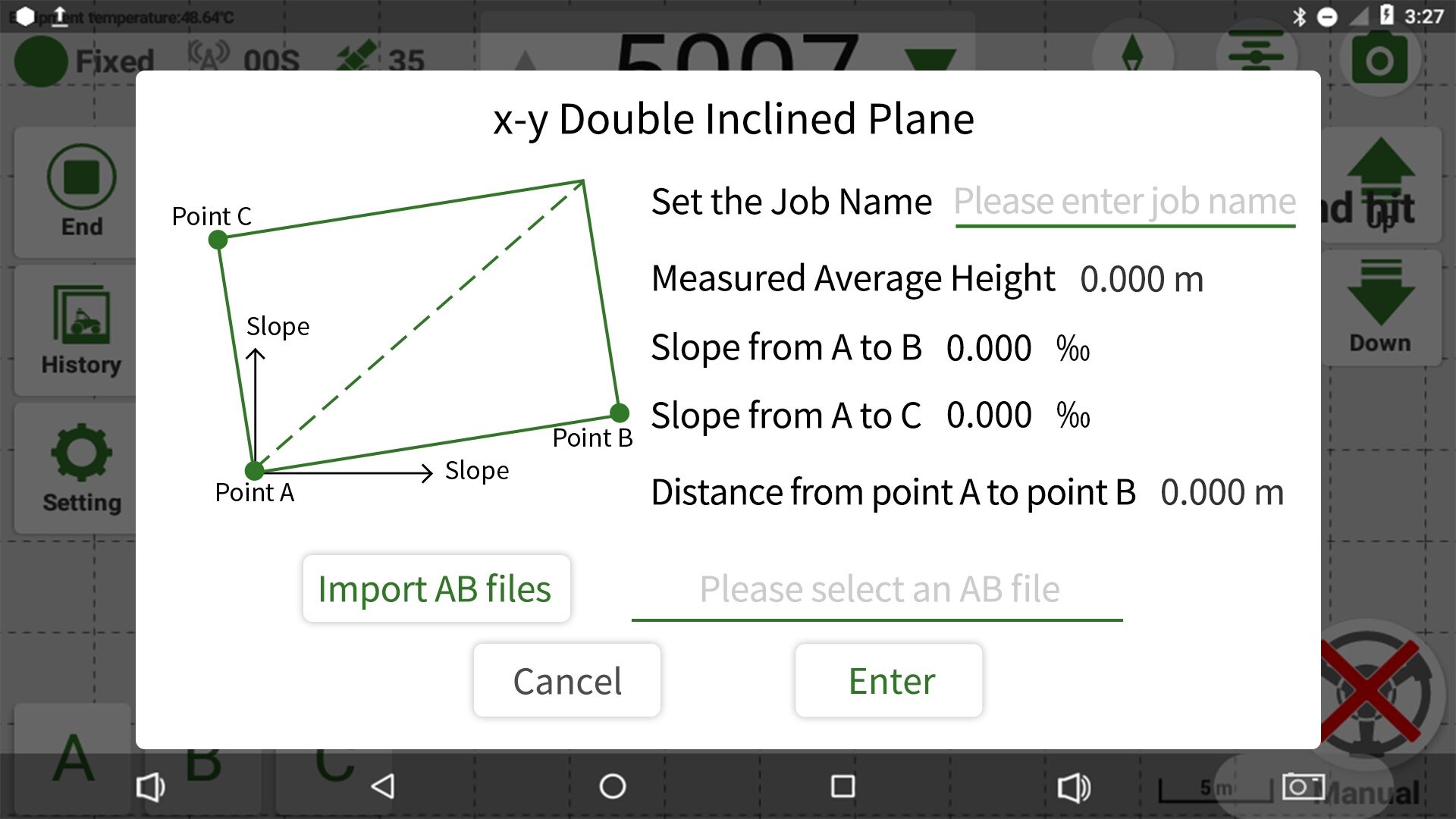
双傾き操作
アプリケーションシナリオ
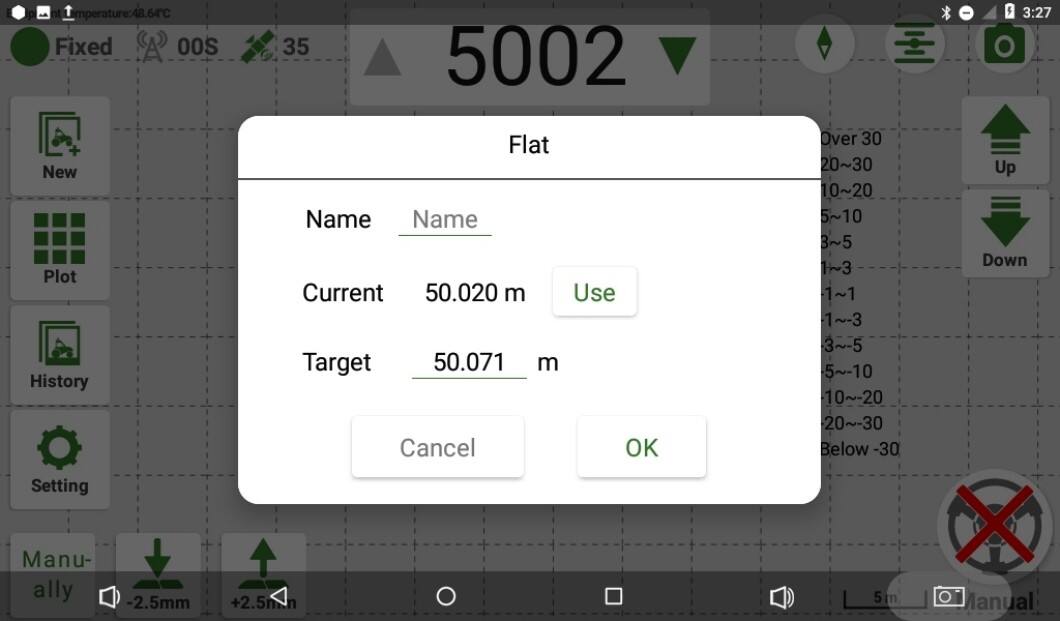
 土地の平ら化
土地の平ら化

田舎の田舎は平らになった




グレードは様々な種類とサイズで使えます
仕様
|
ハードウェア |
||
|
外観 寸法 |
256*156*42 |
|
|
プロテクション |
IP65 |
|
|
衛星アンテナ |
サポート 2つの方法 (メイン/サブ) |
|
|
データ インターフェース |
支援 (一方向) |
|
|
バイ バイ |
塩基配合物 |
|
|
4G |
フォローする 基準値が 発信する 基準の基準を基準に |
|
|
Bluetooth |
ステンレス |
|
|
カメラ |
サポート (1 方向) |
|
|
はい クラッド |
サポート 双カード 双重待機状態 |
|
|
スピーカー |
サポート |
|
|
ディスプレイ |
10.1 インチ |
|
|
ラム |
2GB+16GB |
|
|
テクニカル |
||
|
システム |
アンドロイド 10.0 |
|
|
衛星システム |
全システム & 完全フリー 消化 ポイント |
|
|
周波数 バンド |
Dbs : バイ ポイント バイト B1c B2a B2b GPS : 税金について ロープ ロープ ロープ ローナス について ポイント ロープ ゲリレオ: e1 E2 E5a E5b E6 Qzss: l1 について ポイント ポイント ロープ |
|
|
Rtk 精度 |
飛行機: 1cm+1ppm 高さ: 1.5cm+1ppm |
|
|
時間正確さ |
20n |
|
|
目標の正確さ |
0.2 度/1m ベースライン |
|
|
速度精度 |
速度 0.03m/s |
|
|
ロープ 初期化時間 |
<5s |
|
|
差分 方法 |
移動,GPS MQTT,基地局,ローラ |
|
|
労働 環境 |
||
|
動作温度 |
-20℃ ~ 70°C |
|
|
動作電圧 |
9~16vdc |
|
|
動作 現在 |
2.5A マックス |
|
仕様
|
衛星アンテナ |
|
|
ハードウェア |
|
|
外観 寸法 |
φ142*66.5mm |
|
プロテクション |
IP65 |
|
コネクタ仕様 |
TNC 女 |
|
センター化 棒糸 |
5/8 インチ -11 |
|
テクニカル |
|
|
周波数 バンド
|
銀行口座 バイ ポイント バイト B1c B2a B2b GPS: 位置表示 ロープ ポイント ポイント ローナス ロープ ポイント ロープ ギャリレオ: E1 E5a E5b E6 キーワード: ロープ ポイント ポイント ロープ |
|
動作温度 |
-20℃ ~ 70°C |
|
外観 寸法 |
φ171*76mm |
|
プロテクション |
IP55 |
|
定数トルク |
7n.m |
|
率定 現在 |
10A |
|
率定 電力 |
50W |
|
率定 速度 |
80 (100) 周転/分 |
|
ピークトルク |
16n.m |
|
労働 環境 |
|
|
動作温度 |
-25℃ ~ 55℃ |
|
湿度 |
5%~90%rh |
|
角度センサー ハードウェア |
|
|
外観 寸法 |
φ114*67.5mm |
|
プロテクション |
IP67 |
|
精度 |
0.01°C |
|
データ レート |
10hz |
|
労働 環境 |
|
|
動作温度 |
-20℃ ~ 70°C |
|
動作電圧 |
5V |


 EN
EN AR
AR NL
NL FR
FR DE
DE HI
HI IT
IT JA
JA KO
KO PT
PT RO
RO RU
RU ES
ES SV
SV TL
TL IW
IW ID
ID VI
VI SQ
SQ TH
TH TR
TR MS
MS IS
IS HY
HY UR
UR BN
BN MN
MN